Incremental Potential Contact¶
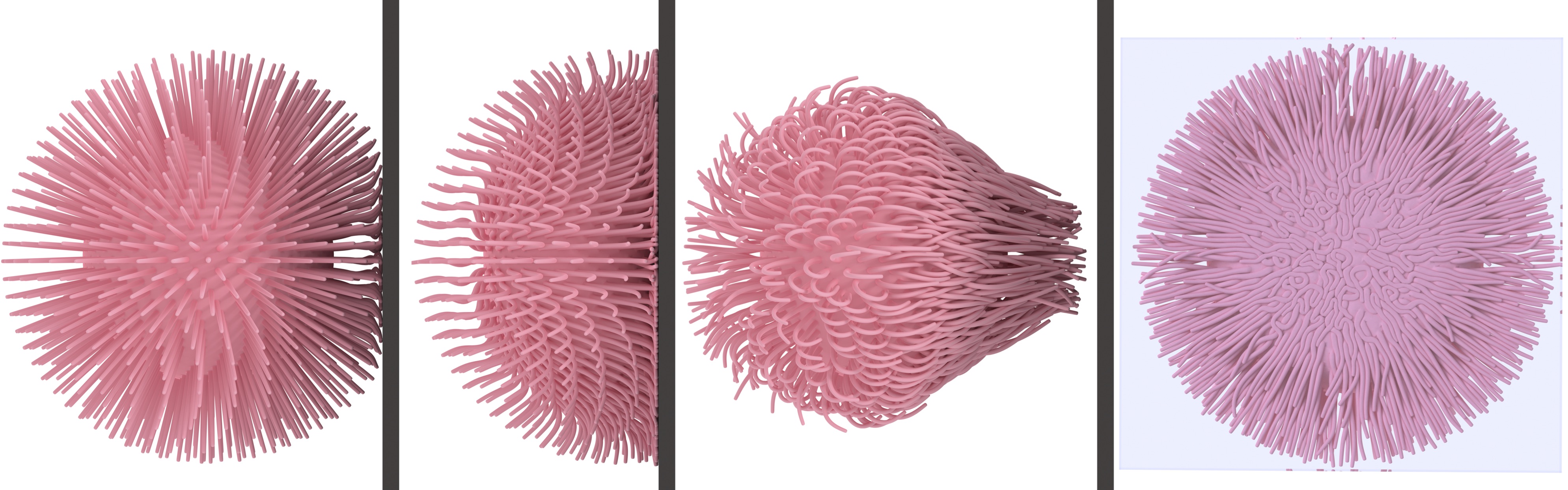
This example aims to reproduce Figure 22 from the paper "Incremental Potential Contact: Intersection- and Inversion-free Large Deformation Dynamics".
{kind=link}








Data¶
The data were generated by compiling and running the original IPC code:
We used the output file 7.obj, 8.obj, 9.obj and 10.obj as data for this figure. The plate.obj file is generated by hand for visualization purposes.Code¶
#!/usr/bin/env python
import hakowan as hkw
import math
# Step 1:
# Create a ball layer. The ball geometry will be speicified later.
# Approximate the original IPC figure with pinkish material.
# Note that Hakowan supports any valid CSS color names as well as hex code codes.
#
# See [CSS colors](https://www.w3schools.com/cssref/css_colors.php).
ball = hkw.layer().material("RoughPlastic", "salmon", alpha=0.02)
# Step 2:
# Create a plate layer containing the collision plate.
# Use glass-like material so one can see the collision-induced deformation clearly.
plate = hkw.layer("data/plate2.obj").material("ThinDielectric")
# Step 3: Adjust configuration.
# For this visualization, it is best to use orthographic projection and avoid perspective
# distortion.
config = hkw.config()
# Use orthographic camera for better visualization of the collision.
config.sensor = hkw.setup.sensor.Orthographic()
# Use volume path integrator to reduce rendering noise.
config.integrator = hkw.setup.integrator.VolPath()
# Step 4: Render!
# We have 4 different results sampled at different time during the simulation.
# We will create two visualizations for each result: side view and back view.
for i in [7, 8, 9, 10]:
# Set the data component of the ball layer.
ball = ball.data(f"data/{i}.obj")
# The side view shows the ball-plate collision from the side.
side_view = ball + plate
hkw.render(side_view, config, filename=f"results/ipc_side_{i}.png")
# The back view shows the ball-plate collision from behind the plate.
# Rotation matrix to rotate around y-axis by 90 degrees.
back_view = (ball + plate).rotate(axis=[0, 1, 0], angle=-math.pi / 2)
hkw.render(back_view, config, filename=f"results/ipc_back_{i}.png")